The AUTOSAR partnership brings together leading companies across the automotive and software industry to develop and establish the standardised software framework and open E/E system architecture for intelligent mobility. It’s an exciting prospect, promising to establish global standards for future mobility. And with more than 30 partners across the globe, its potential to bring some much-needed standardisation is vast.
For me, however, the partnership’s greatest potential is rooted in safety, which it identifies as one of its core pillars. Safety still poses the biggest questions surrounding autonomous vehicles (AVs) as we consider how we can move from continuous small-scale trials to broadscale commercial deployments. How can we ensure vehicles are truly safe? How do we even define ‘safe’? It’s not enough to be able to demonstrate that an AV can safely travel in a predetermined route from A to B. To truly realise autonomous transport we need to know that AVs will be able to handle anything that the roads and highways can throw at them, that they will be able to recognise and appropriately handle the one-in-a-million chance incidents and accidents.
With more than 30 partners across the globe, its potential to bring some much-needed standardisation is vast
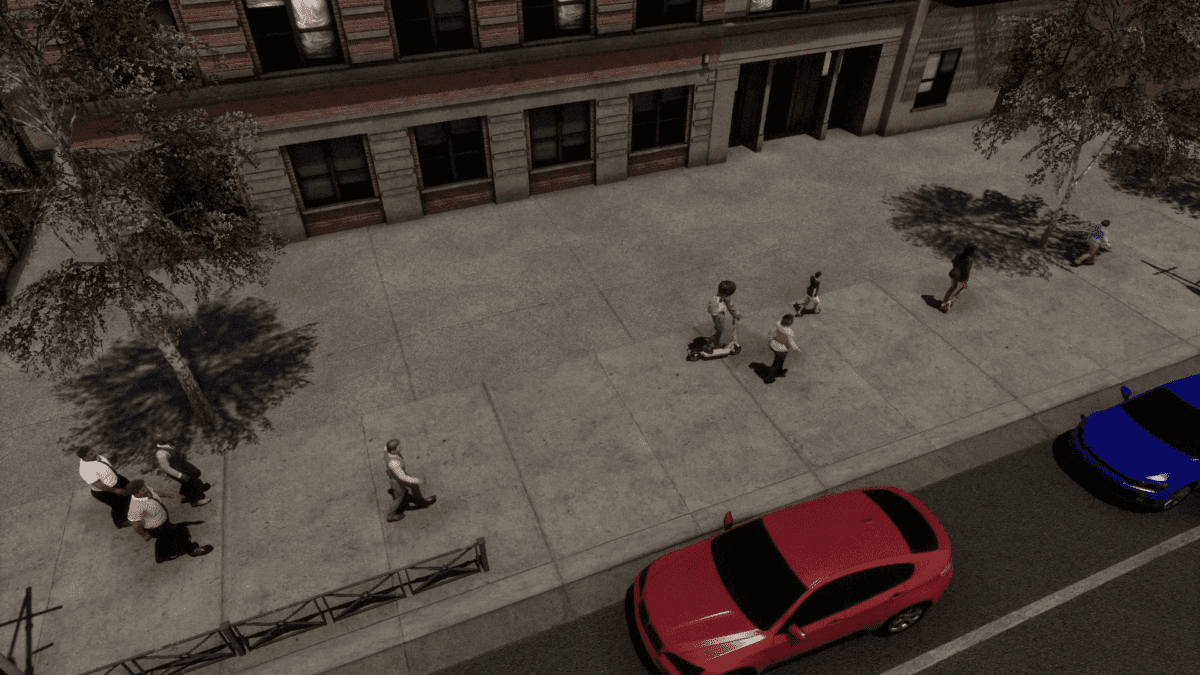
Today, that’s not how AVs are being developed. They are built for common scenarios that crop up time and time again in accident reports such as rear-end collisions. But as any driver knows, it’s the edge cases we encounter-and the reactions of other road users to these unexpected scenarios that really test our driving. The trampoline blown onto the motorway in the middle of a storm, the child that follows a bouncing ball into the road or the duck that decides to cross the dual carriageway with her ducklings. These scenarios—and the countless others we can’t even envisage and may not have even happened yet—are what AVs need to be trained to manage. To do that from a development perspective is complex: how do you identify the scenarios to test and train? How do you avoid overtraining whereby achieving a safe response to one scenario makes the vehicle demonstrably worse in another?
These challenges can be overcome by adopting an edge case-first approach to testing which looks at the full spectrum of risk. It might seem sensible to start with tackling the easier scenarios first, but to cope with the true complexity of the real world the reverse is actually true. And it’s not just training—or retraining—AVs to cope with these scenarios that is challenging. One of the greatest hurdles to overcome is that today there are no singularly accepted standards or protocols by which AV developers can prove to insurers, regulators and the public that their vehicles are safe.
The lack of a robust, set ‘test’ that demonstrates an AV is safe is not just a barrier to regulators and insurers but also to the industry; we need to find a way to reassure all stakeholders and users. By taking the lead and proactively evidencing safety, the industry can build confidence and demonstrate a commitment to this key issue.

This is where AUTOSAR can play a significant role. They have already coalesced a powerful group of OEMs and Tier 1 suppliers with a clear remit and ambition, including a focus on safety. By agreeing to establish a set of safety standards to which all partners adhere, and promoting this as an example of best practice for AV developers outside the partnership, we can materially advance the safety of AVs, and the rate at which we are likely to see full-scale commercial deployments on the roads. The partnership model also allows for distributed development and sharing amongst partners, bringing further benefits when it comes to doing the heavy lifting of ensuring AVs can meet edge-cased focused safety standards.
It’s easy to assume that because AVs have been demonstrated to be broadly safe, that we’ve done enough. But this is a complex and nuanced topic, and until we know AVs can handle the complexity of edge cases, we won’t be able to capitalise upon the promises of this amazing technology. The industry has an opportunity to lead the charge here. AUTOSAR can drive that charge with a firm commitment to testing for edge cases.
About the author: Rav Babbra is Head of Business Development at drisk.ai and partner in the co-innovation project D-RISK, with Imperial College London, DG Cities and Claytex